Onderzoekers van de University of California hebben een perceptie-framework voor robots gemaakt, waarmee de apparaten objecten kunnen herkennen door ze aan te raken. Dat meldt Venturebeat.
De onderzoekers bouwden door op werk gepubliceerd door onderzoekers van Carnegie Mellon University. Daarmee probeerden ze een kunstmatige intelligentie (AI) systeem te ontwerpen dat kan herkennen of een set aan fysieke observaties overeenkomen met specifieke objecten.
Mensen associeren het uiterlijk en materiaaleigenschappen van objecten natuurlijk over meerdere modaliteiten. Ziet iemand bijvoorbeeld een zacht speeltje, dan stelt diegene zich voor hoe zijn vingers zouden voelen als ze het zachte oppervlak aanraken. Als iemand de rand van een schaar aanraakt, kan diegene de schaar voorstellen. Niet alleen de identiteit van de schaar, maar ook de vorm, de grootte en de proporties.
Onderzoek
De wetenschappers wilden dit soort associaties ook aanleren aan een robot manipulator. Dat bleek echter niet eenvoudig. Tactiele sensoren missen de “globale blik” die beeldsensoren wel hebben. De tactiele sensoren werken met betrekking tot lokale oppervlakte-eigenschappen. Ook zijn de metingen van deze sensoren moeilijker te interpreteren.
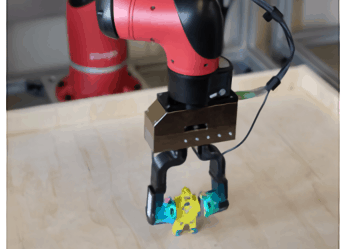
Het team loste dit op door een GelSight-aanraaksensor van hoge resolutie – die metingen genereert met een camera die gelvervormingen gemaakt door het contact met een object waarneemt – te combineren met een convolutioneel neuraal netwerk.
Er werden twee GelSight-sensoren op de vingers van een parallelle kaakgrijper geplaatst, die gebruikt werden om een dataset samen te stellen van de observaties van de camera en de metingen van de tactiele sensoren als de grijper zijn vingers succesvol om de objecten heen kreeg.
resultaten
In totaal verzamelden de onderzoekers monsters voor 98 verschillende objecten. 80 daarvan werden gebruikt om het neurale netwerk te trainen. De andere 18 werden bewaard als testset. In de tests bleek het systeem in 64,3 procent van de gevallen in staat om accuraat te bepalen wat de identiteit van objecten was. Hierbij ging het ook om objecten die het tijdens het trainen niet was tegengekomen.
Er is nog wel ruimte voor verbetering, aldus de onderzoekers. Alle beelden kwamen namelijk uit dezelfde omgeving. Ook zeggen ze dat het onderzoek alleen uitging van individuele grepen, in plaats van meerdere tactiele interacties. Toch is het een veelbelovende eerste stap richting perceptiesystemen die net als mensen objecten kunnen identificeren door ze alleen aan te raken, aldus de onderzoekers.